- Properly
fitting safety gear is essential for preventing injuries in
motorcycle mishaps.
- Unlike
passengers in an automobile, motorcyclists
are not automatically (for the most part) protected by restraining
systems, systems
designed to prevent blunt force trauma and head injuries, systems
designed to prevent
abrasive injuries or even barriers against the elements. Motorcyclists wear
most of those
systems in the form of helmets, gloves, boots,
leather and/or textile jackets and pants.
- There
is absolutely no evidence for any argument supporting the idea that
riding motorcycles without helmets enhances safety. It does
not.
- Helmets
must fit properly in order to perform optimally. Helmets are designed
to do three things: cushion the brain against impact (traumatic
brain injury) during a
collision, shield against objects
penetrating the cranium in an accident, and prevent abrasion
of the face and skull.
- Although
the causes of brain injuries are complex, accelerations as low
as the equivalent to just a few g's can produce mild concussions.
- In
any collision, the change in momentum
(momentum,denoted
p,
is equal to the product of mass x velocity: p
= mv) is equivalent to the product of the average force of the
collision times the interval of time over which the collision
occurs, a quantity knows as the impulse,
i.e.:

- The
average force
generated in a collision is equal to the momentum change
during the
collision divided by the time interval (Note:
the momentum at the conclusion of the collision is
generally
close to zero):

- Any
combination of high pre-collision speed and short collision time
results in a large value of F
(collision force) and hence a large acceleration.
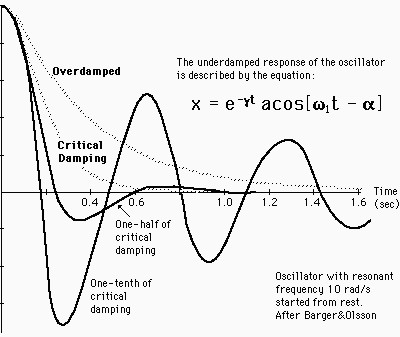
- Helmets
employ layers of cushioning to extend the time interval over which the
collision occurs and reduce the acceleration experienced by the brain
in collisions. But in order for the cushioning to work as designed the
helmet must fit properly (snugly). A loose-fitting helmet results in
two
collisions during an impact - the second when the head impacts the
cushioning in the helmet.
- Helmets
employ a fiberglass, polycarbonate or composite shell to protect
against penetration and abrasion. Although harder, stiffer shells
(fiberglass) do a better job at this, there is significant evidence
that they are less effective at cushioning the brain during an
impact.
- There
is no correlation between purchase price and effectiveness at
protection among D.O.T. and Snell certified helmets. Selecting a helmet
with a proper fit is more important for safety than merely obtaining an
expensive helmet.
- Although
more expensive helmets often provide superior ventilation, better
optics and less noise - all important features - they are not
necessarily more protective.
- Motorcycle
protective clothing incorporates padding to cushion against blunt force
trauma and an abrasive resistant material with a low coefficient of
kinetic friction against asphalt.
- Leather
is generally superior to
textiles (especially denim) in terms of abrasion resistance. Textiles
are generally more comfortable to wear and more weatherproof. Textile
jackets and pants normally have
extra padding or hard armor
in key areas to increase abrasion protection.
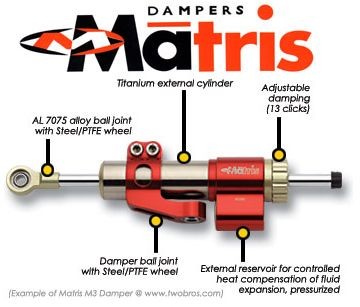
- Many
motorcyclists wear some form of hard
armor or a spine
protector either incorporated
into their protective clothing
or underneath their clothing. Neck
braces
are
also becoming increasingly popular.
- Top
grade motorcycle gloves
incorporate leather, carbon fiber, Kevlar and other synthetics to
provide protection without a loss of tactile
sensitivity.
- Top
grade motorcycle boots
incorporate an array of leather and
synthetic materials to provide protection, comfort and stability.

|